【2023年ロボット紹介】
クリックしてフォローしていただけると幸いです。
・以下の文を読んでわかる通りこのページでは、情報公開など言った素晴らしいことは書いていません。
私たちの思い出が残ればなーと思い残しました。
参考にできるところがあればどうぞ!
・メインコマイコン
Arduino mega 2560
・モータードライバー
6CHモーターコントローラー
・IRセンサー
シングルパルスボールセンサー
・ラインセンサー
ホワイトラインセンサー
・モーター
ロボサイトモーター15:1
・コンパスセンサー
9軸デジタルコンパス
・ユニバーサル基盤
72*95*1.6t
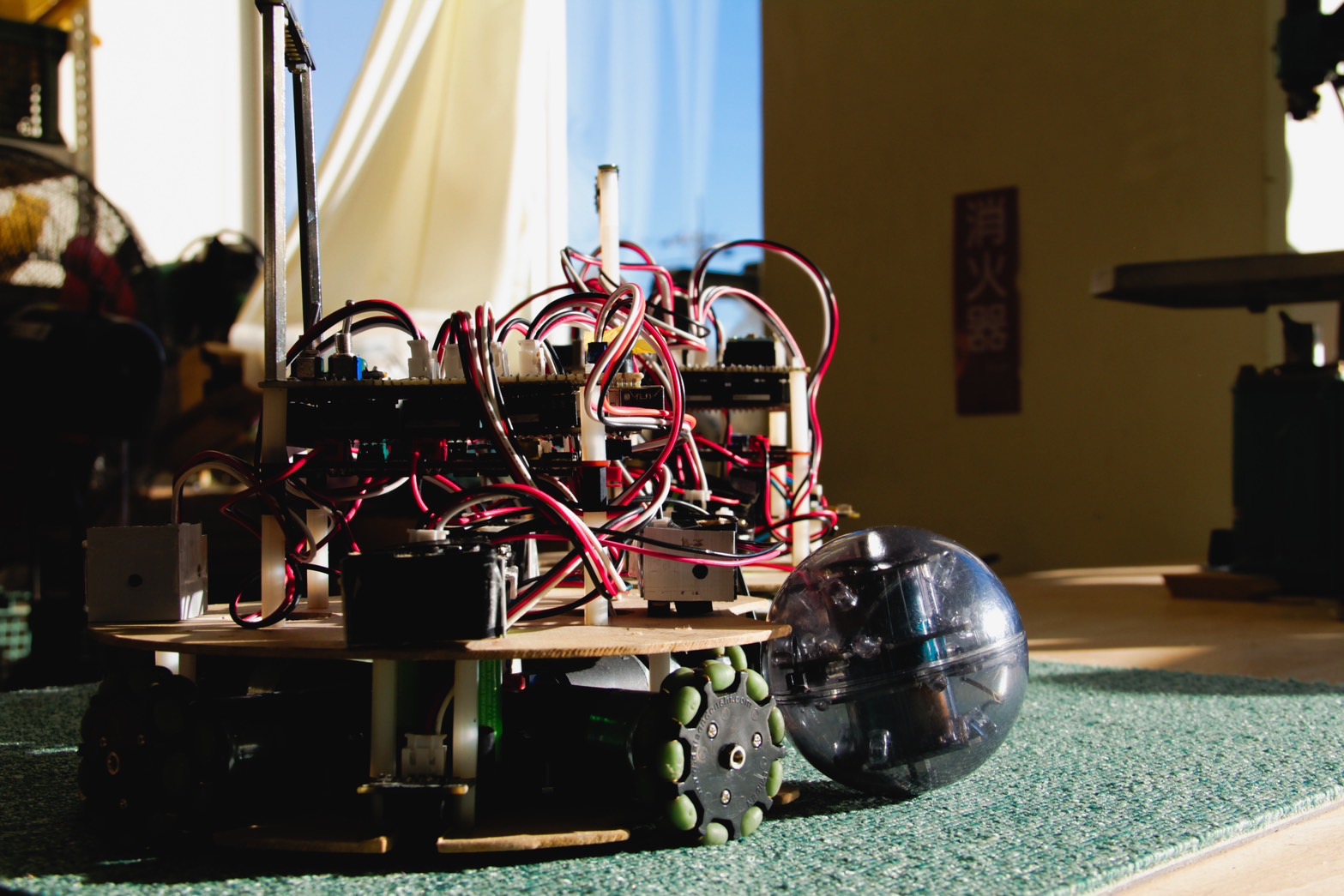
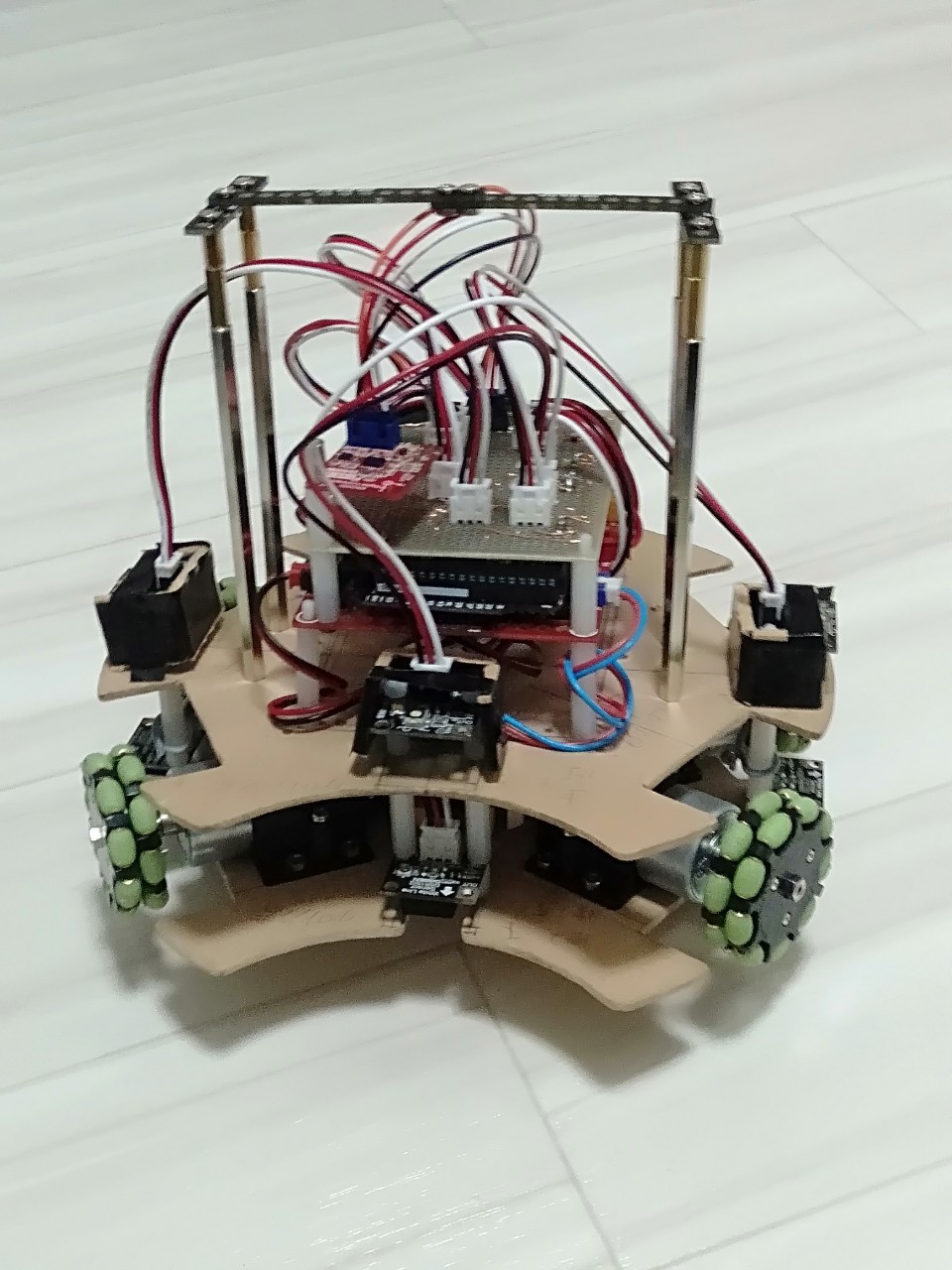
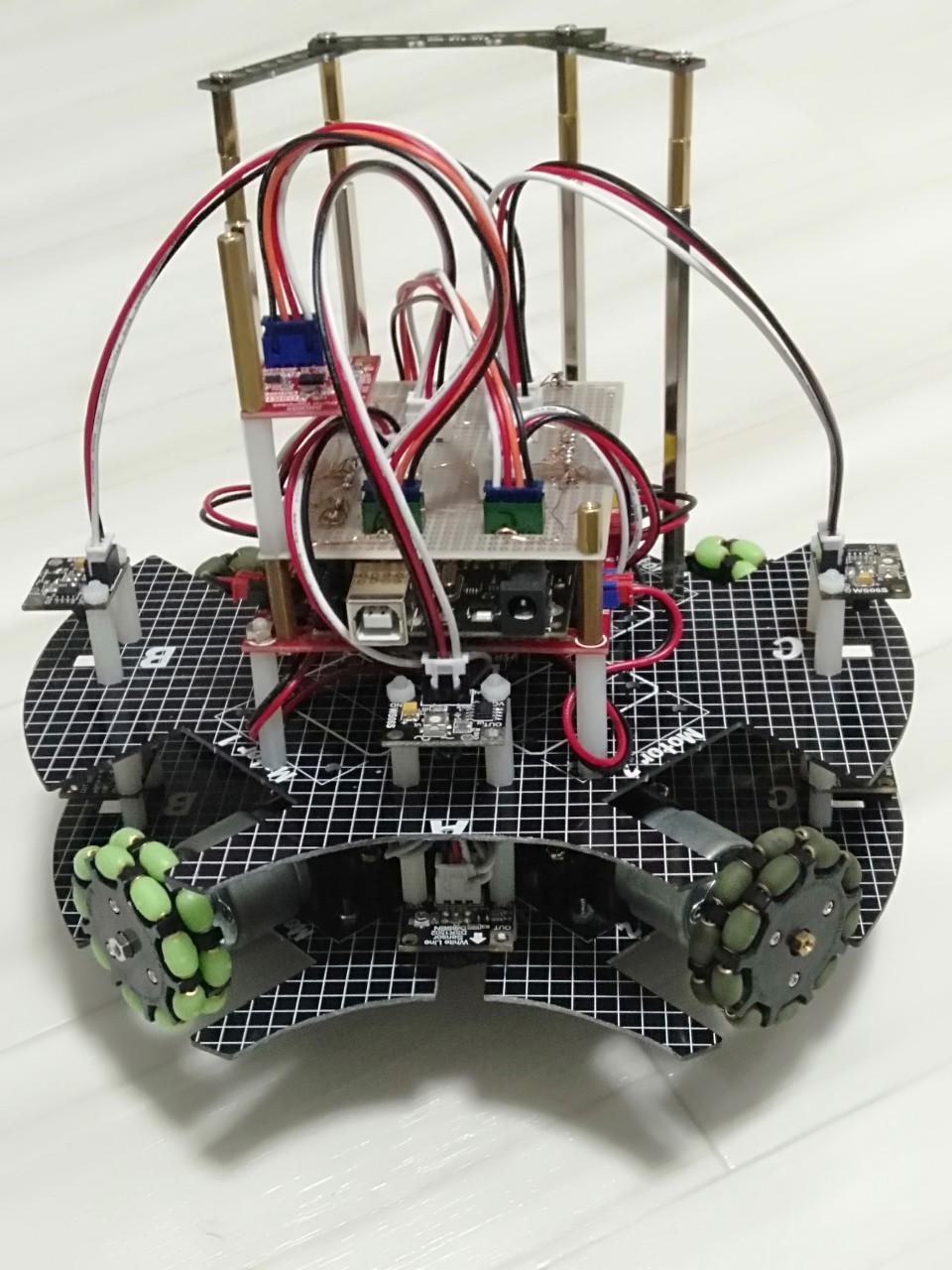
・ボールをキープしゅる面積を大きくするためモーターの設置角度を120度に設定した。
・ボールの角度のを計算しやすくするためirセンサーの周りにカバーをつけてバグを抑ええた。
・基盤をユニバーサル基盤にすることでコストを削減した。
・土台にmdfを使うことによって簡単に加工できるようにした。
・当時は三角関数やベクトルのことも知らなかったため、センサーから読み取った値を変数に代入し、
モーターでばーーと回してる感じでした。
プログラムファイルも1つでしたし関数もmein関数1つで回していたのでメンテナンス性が皆無でもう大変。
一様Githubにプログラム乗っけておきますねw
⇩ ⇩ ⇩ ⇩ ⇩ ⇩ ⇩ ⇩ ⇩ ⇩ ⇩ ⇩
2023関東大会プログラム
⇧ ⇧ ⇧ ⇧ ⇧ ⇧ ⇧ ⇧ ⇧ ⇧うえ⇧ ⇧
・Github Pagesで公開していますが、初級者なので、おててをやわらかにお願いします!