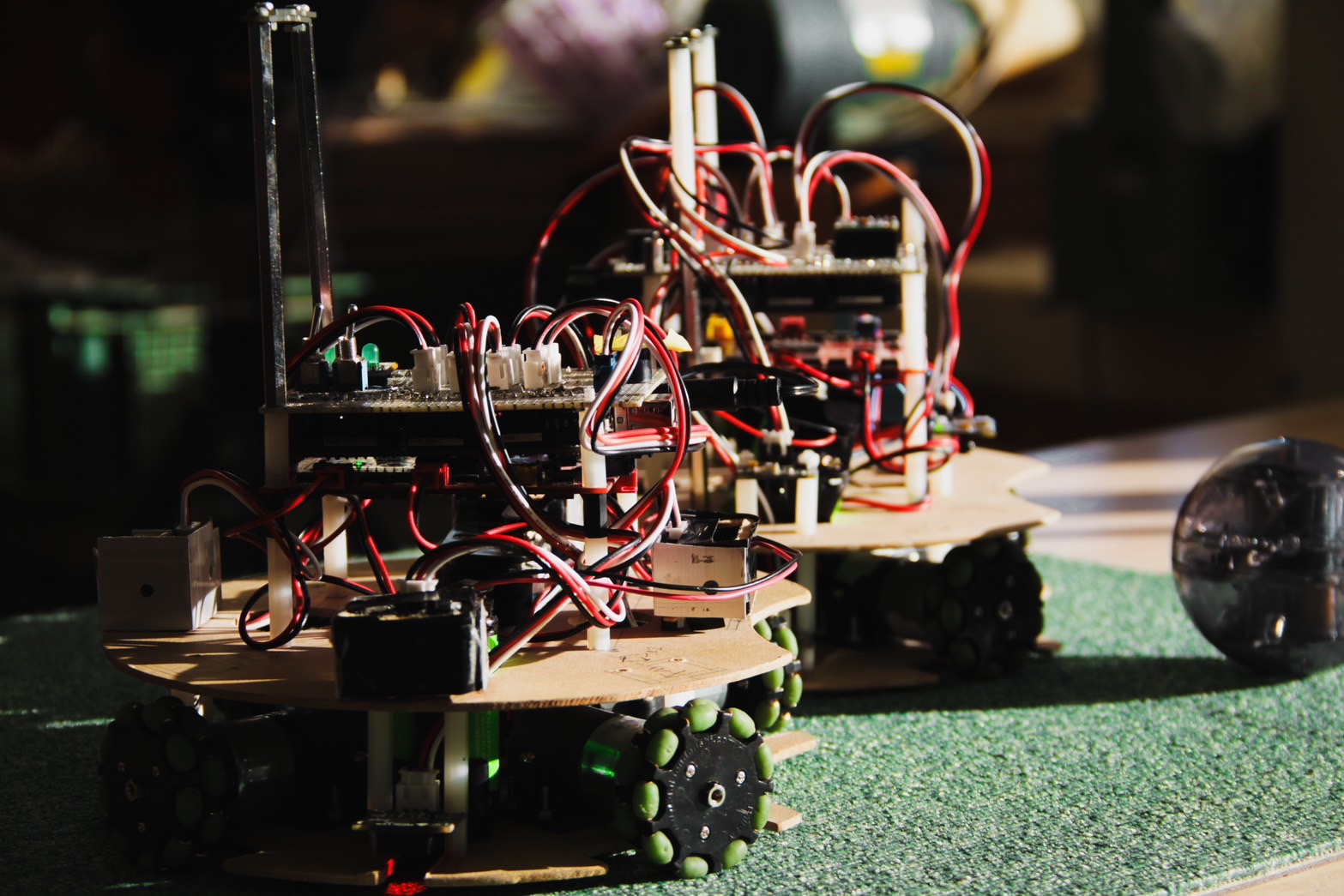
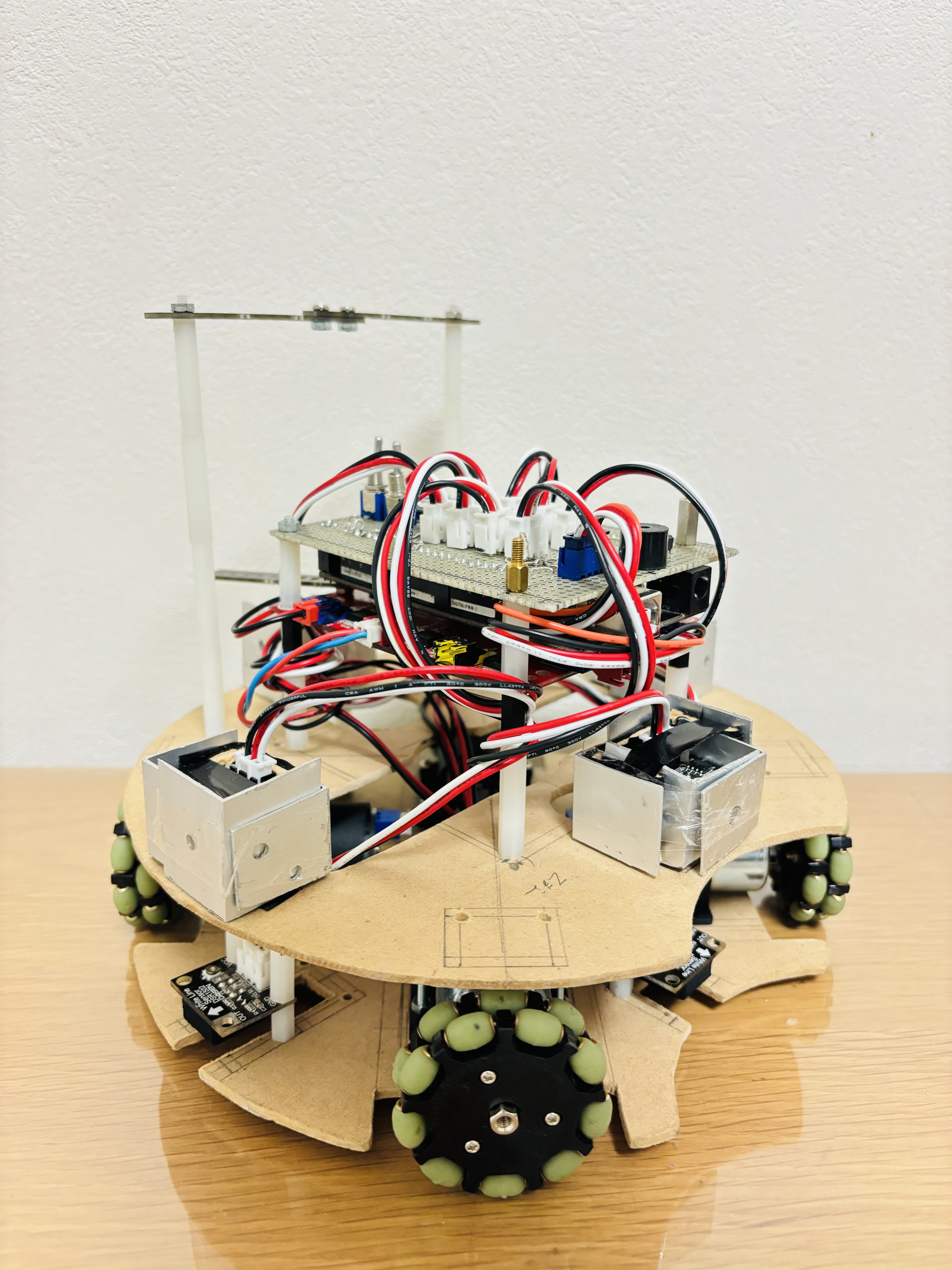
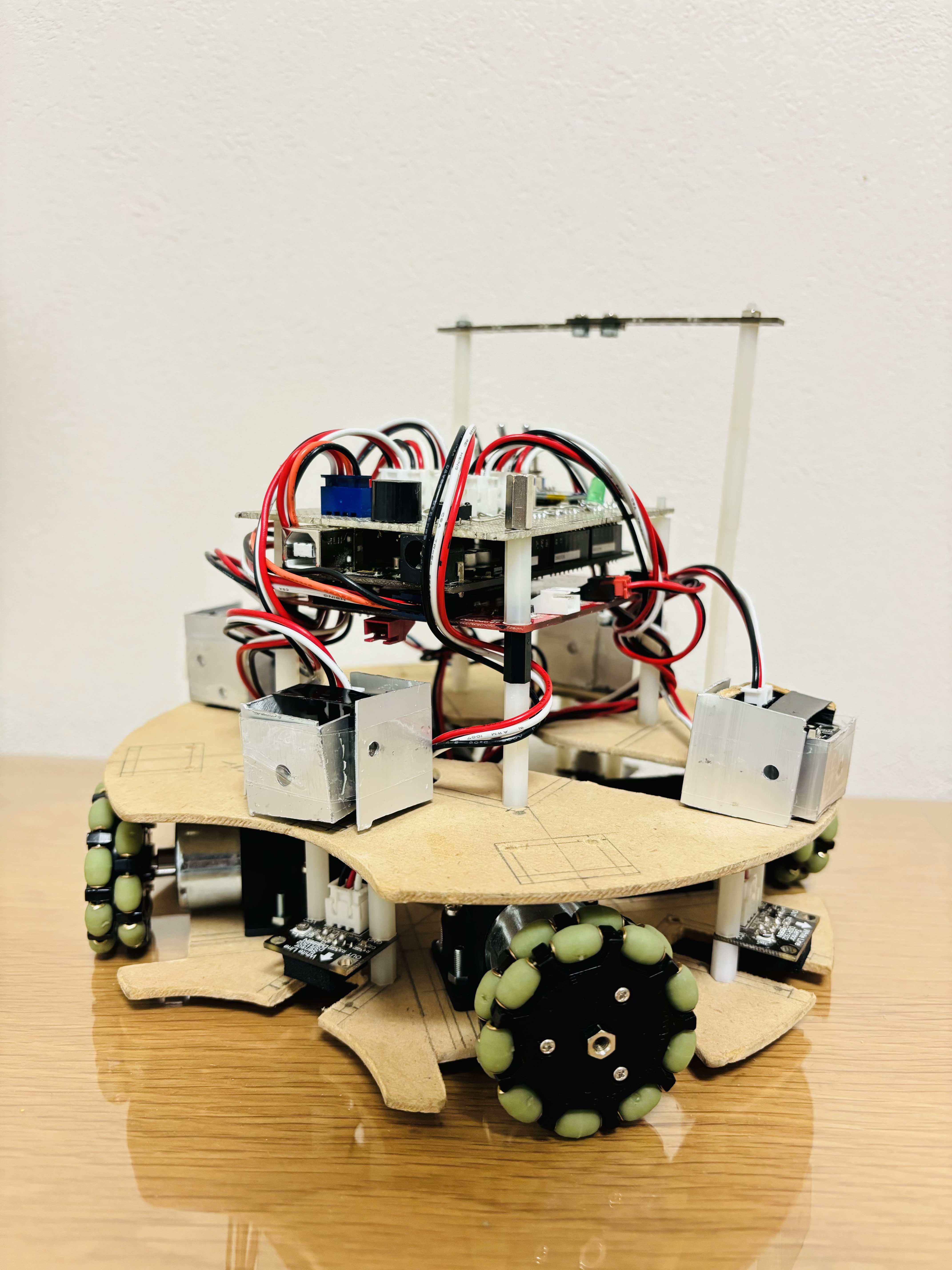
【2024年ロボット紹介】
クリックしてフォローしていただけると幸いです。
・以下の文を読んでわかる通りこのページでは、情報公開など言った素晴らしいことは書いていません。
私たちの思い出が残ればなーと思い残しました。
参考にできるところがあればどうぞ!
・メインマイコン
Arduino mega 2560
・モータードライバー
6CHモーターコントローラー
・IRセンサー
シングルパルスボールセンサー
・ラインセンサー
ホワイトラインセンサー
・モーター
ロボサイトモーター15:1
・ジャイロセンサー
MPU6050
スピーカー
圧電スピーカー
・ユニバーサル基盤
72*95*1.6t
・コンパスセンサーからジャイロセンサーに変更し会場によってプログラムを変更しないで済むようにした。
・白線を検出した場合音を出すようにしプログラムが正常化どうか簡単に確かめられるようにした。
・モーターの取り付け角度を90度にしベクトルの計算をしやすくした。
・スペンサーをプラスチック製にすることによりロボットの軽量化を図った。
・cppのclass機能を使いヘッダファイルを作製しプログラムのメンテナンス性を向上させた。
・三角関数やベクトルを使用することにより正確にロボットを動かすことが可能になった。
・関数とプログラムファイルをある程度グループ分けすることにより読みやすくした。
⇩ ⇩ ⇩ ⇩ ⇩ ⇩ ⇩ ⇩ ⇩ ⇩ ⇩ ⇩
2024関東大会プログラム
⇧ ⇧ ⇧ ⇧ ⇧ ⇧ ⇧ ⇧ ⇧ ⇧ ⇧ ⇧
・Github Pagesで公開していますが、初級者なので、おててをやわらかにお願いします!